|
Aerodynamic characterisation platform featuring a custom Rust orchestrator for controlling a Stäubli Robotics System.
Role
Master's Project
Timeline
Spring 2025
Tech Stack
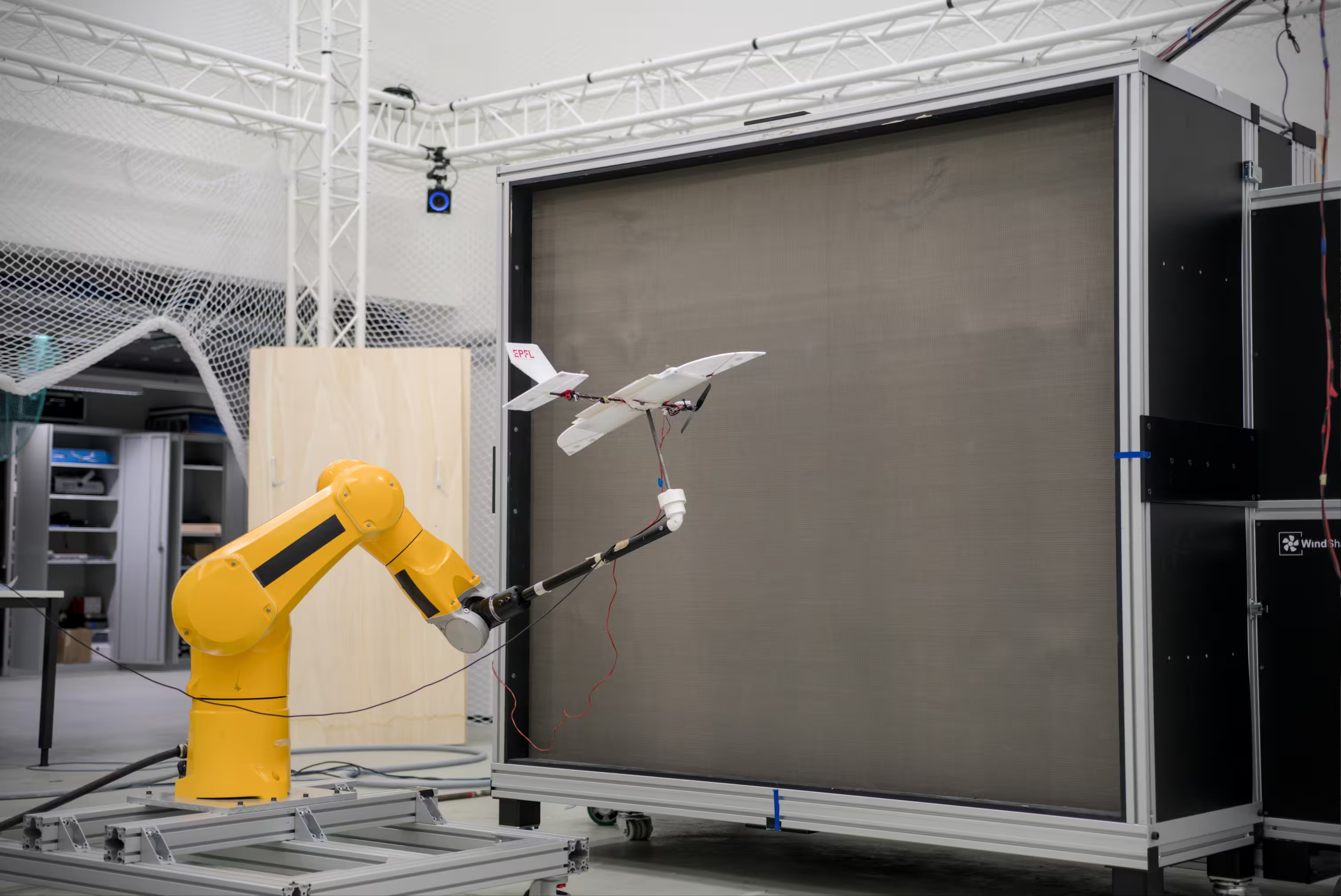
Project CARAC represents a significant leap forward in aerodynamic testing capabilities for the Laboratory of Intelligent Systems (LIS) at EPFL. The goal was to create a highly automated, precise, and flexible platform for characterising the aerodynamic properties of drones and other flying vehicles.
The Challenge. Existing solutions lacked the ability to perform complex, dynamic manoeuvres in the wind tunnel while simultaneously capturing high-frequency data. We needed a system that could synchronize the motion of a 6-axis industrial robot with a suite of sensors.
The Solution. I architected and built a distributed control system. The core is a custom Rust orchestrator that interfaces directly with the Stäubli robotics controller via a Ethernet UDP link.
On the experiment side, a Python-based ecosystem allows researchers to define flight paths and data acquisition parameters easily. The system automatically triggers measurements, handling synchronization between the robot's position and the aerodynamic forces being measured.
Key Outcomes
- Enabled dynamic characterisation (non-steady state aerodynamics)
- Successfully used for multiple master theses and doctoral research projects